AutoEncoder、DAE と VAE (VAE実装含む)
目次
- 目次
- オートエンコーダー(Autoencoder)
- DAE(Denoising Autoencode)
- DAE vs 普通の AE の違い
- 変分オートエンコーダー(Variational Autoencoder, VAE)
- AEとVAEの違い
- VAE vs GAN
- VAE 実装
オートエンコーダー(Autoencoder)
オートエンコーダーは、主に教師なし学習に使われるニューラルネットワークの一種で、データの効率的な表現を学ぶことを目的とします。特に、次元削減や特徴抽出に用いられます。
- エンコーダー(Encoder):入力データを低次元空間に圧縮。
- 潜在ベクトル(Bottleneck/Code):圧縮された情報が格納される部分。
- デコーダー(Decoder):潜在ベクトルから元の入力データを復元。
数式による表現
- 入力データ:$ x $
- 再構成されたデータ:$ x’ $
- 潜在空間での表現(圧縮された特徴):$ z $
エンコード関数(Encoder):
- $ f(x) $ はニューラルネットワークで構成される関数であり、入力 $ x $ を低次元の潜在変数 $ z $ に変換します。
デコード関数(Decoder):
- $ g(z) $ もニューラルネットワークで構成され、潜在変数 $ z $ から入力 $ x $ と似たデータを再構成します。
目的関数(損失関数):
AE の目的は、出力 $ x’ $ が入力 $ x $ にできるだけ近づくように学習することです。一般的には次のような損失関数を使用します:
- MSE(平均二乗誤差):
- Binary Cross Entropy(バイナリ交差エントロピー):
画像が0〜1の範囲の値を持つ場合などに使用されます。
応用例
- 次元削減(PCAの非線形版)
- ノイズ除去(Denoising AE)
- 異常検知(再構成誤差が大きい=異常)
- 特徴抽出(潜在空間 $ z $ を他のタスクに利用)
コード例
import torch
import torch.nn as nn
class Autoencoder(nn.Module):
def __init__(self):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(784, 256),
nn.ReLU(),
nn.Linear(256, 64)
)
self.decoder = nn.Sequential(
nn.Linear(64, 256),
nn.ReLU(),
nn.Linear(256, 784)
)
def forward(self, x):
z = self.encoder(x)
return self.decoder(z)
DAE(Denoising Autoencode)
DAE(Denoising Autoencoder)は、ノイズ除去を目的としたオートエンコーダー(Autoencoder)の一種です。通常のオートエンコーダーとは異なり、意図的にノイズを加えた入力データから、ノイズを取り除いた元のデータを再構成するように学習します。
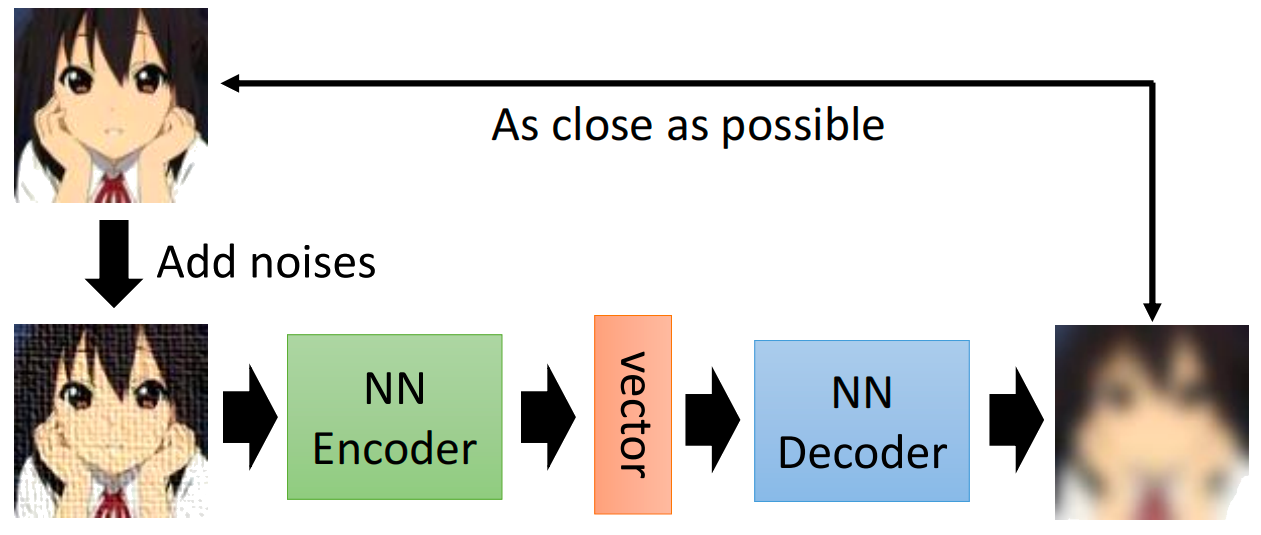
基本的な仕組み
-
入力にノイズを加える
入力データ $ x $ に対して、ある種のノイズ(例:ガウシアンノイズ、マスクノイズ)を加えて、損なわれたデータ $ \tilde{x} $ を作ります。 -
エンコーダーで潜在表現を抽出
損なわれたデータ $ \tilde{x} $ をエンコーダー関数 $ f $ に入力し、潜在ベクトル $ z $ を得ます: -
デコーダーで元のデータを再構成
潜在ベクトル $ z $ をデコーダー関数 $ g $ を使って復元し、元のノイズなしデータ $ x $ に近づける: -
損失関数で誤差を最小化
再構成された $ \hat{x} $ とオリジナルの $ x $ の間の誤差(MSEやBCEなど)を最小化することで、モデルがノイズを除去できるように学習させます。
数式による表現
- ノイズ入り入力:
- エンコード:
- デコード:
- 損失関数(MSE):
実装例
import torch
import torch.nn as nn
import torch.nn.functional as F
class DenoisingAutoencoder(nn.Module):
def __init__(self):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(784, 256),
nn.ReLU()
)
self.decoder = nn.Sequential(
nn.Linear(256, 784),
nn.Sigmoid()
)
def forward(self, x):
z = self.encoder(x)
return self.decoder(z)
# ノイズを加える例(訓練時)
def add_noise(x, noise_factor=0.2):
return x + noise_factor * torch.randn_like(x)
# 使用例
model = DenoisingAutoencoder()
x_clean = ... # clean image tensor
x_noisy = add_noise(x_clean)
x_recon = model(x_noisy)
loss = F.mse_loss(x_recon, x_clean) # 損失計算
DAE vs 普通の AE の違い
| 項目 | 普通の Autoencoder | Denoising Autoencoder |
|---|---|---|
| 入力 | 生データ $ x $ | ノイズ付きデータ $ \tilde{x} $ |
| 出力 | 再構成データ $ x’ $ | 元の生データ $ x $ |
| 学習目標 | データの圧縮・再構成 | ノイズ除去 |
| 特徴 | 潜在空間に構造を捉える | ノイズに頑健な表現を学ぶ |
変分オートエンコーダー(Variational Autoencoder, VAE)
VAE とは、対数尤度を最大化するように学習するオートエンコーダーのことです。
新しいデータを生成できるのが大きな特徴です。
直感的な理解
- 普通のAutoencoder:入力 $ x $ → 固定値 $ z $ → 再構成 $ x’ $
- VAE(Variational Autoencoder):入力 $ x $ → 正規分布 $ (\mu, \sigma) $ → ノイズ$ \varepsilon \in \mathcal{N}(0,1) $を加え → $ z $ をサンプリング → 再構成 $ x’ $
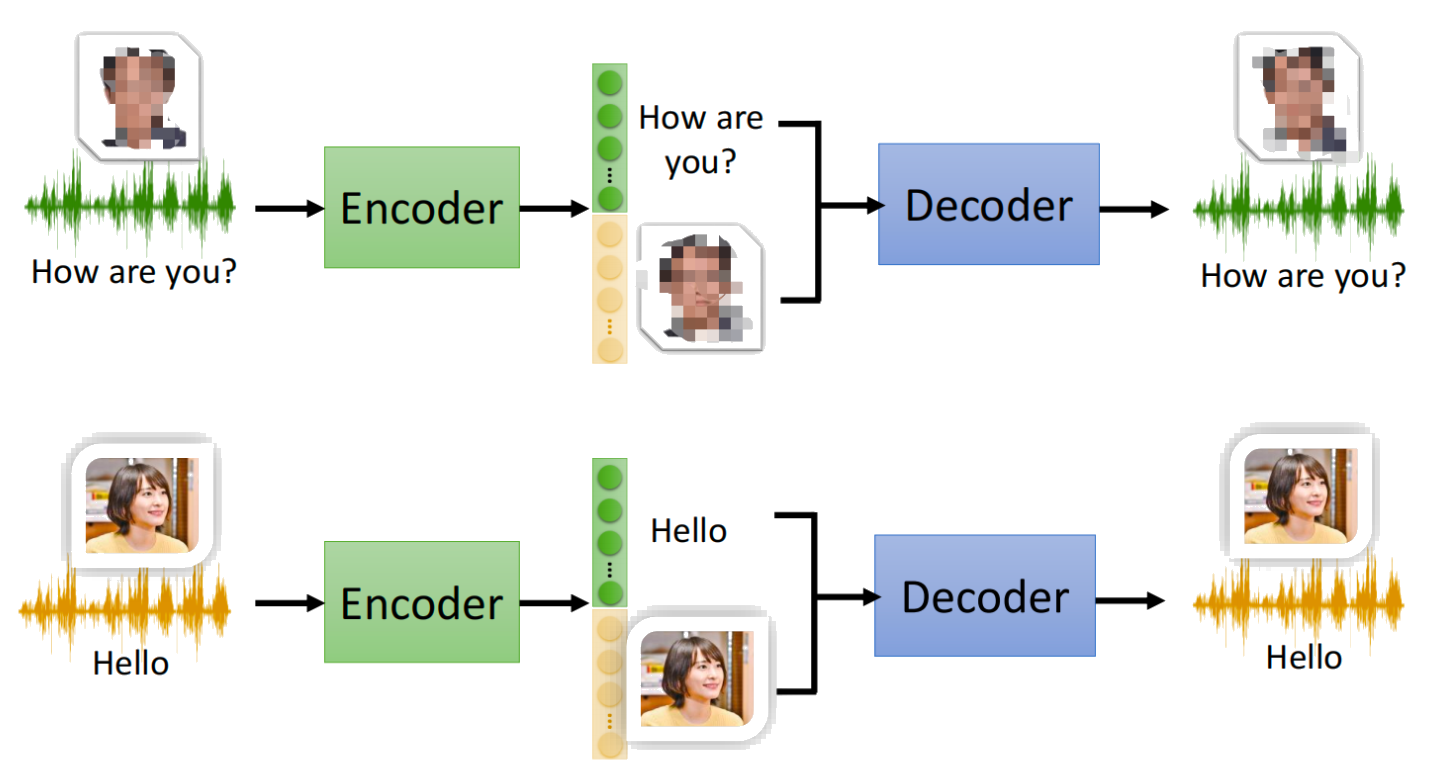
例:顔画像を入力すると、VAE は「笑顔の強さ」「髪型」「年齢」などの特徴を表す確率分布として潜在空間に表現します。デコーダーはその分布からランダムに値を取り出し、新しい顔画像を生成できます。
VAEの基本構造と原理
VAEは次の2つのネットワークで構成されます:
-
推論ネットワーク(Encoder)
- 入力 $ x $ を与えると、潜在変数 $ z $ の近似事後分布 $ q(z|x) $ を出力。
- 出力は平均 $ \mu $ と分散 $ \sigma^2 $。
-
生成ネットワーク(Decoder)
- 潜在変数 $ z $ から入力 $ x $ に類似したデータ $ x’ $ を復元。
- 分布 $ p(x|z) $ をモデル化。
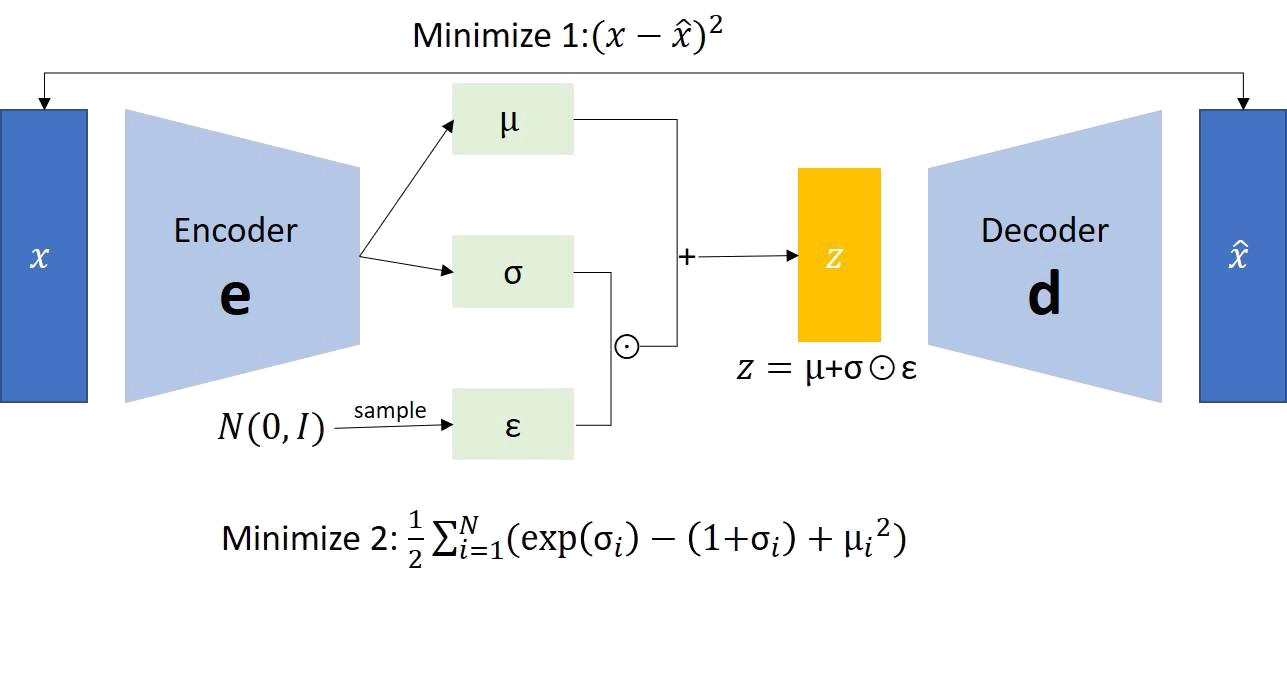
数式による表現
1. Encoder(推論ネットワーク)
-
平均 $ \mu $ と標準偏差 $ \sigma $ をニューラルネットワークで出力。
-
潜在変数 $ z $ は以下の方法でサンプリング:
→ この手法は「再パラメータ化トリック」と呼ばれます。
2. Decoder(生成ネットワーク)
- 一般的にはベルヌーイ分布(画像など0/1値)やガウシアン分布を使用。
- データ $ x $ を $ z $ から復元する条件付き分布。
VAEの目的関数:ELBO(Evidence Lower Bound)
VAEの学習目標は、対数尤度 $ \log p(x) $ を最大化することですが、直接計算は困難です。そのため、ELBO(Evidence Lower Bound) を最大化します。
この右辺が ELBO であり、次のように分解されます:
-
再構成損失(Reconstruction Loss)
- デコーダーが出力する $ x’ $ がどれだけ $ x $ に近いかを評価。
- 実装上は BCE(Binary Cross Entropy)や MSE を使用。
-
KL散逸(KL Divergence)
- 潜在変数の分布 $ q(z|x) $ が事前分布 $ p(z) $(通常は標準正規分布)に近づくように制約を与える。
VAEの利点・応用
- 滑らかな潜在空間:隣接する $ z $ 値は似たような出力を生成。
- 新規データ生成:潜在空間からのサンプリングで新しいデータを生成可能。
- 内挿・外挿:潜在空間上で線形補間することで、中間的なデータを生成。
- 応用分野:
- 画像生成(例:顔、風景)
- 音声合成
- 半教師あり学習
- 異常検知(KL項 or 再構成誤差を利用)
実装例
import torch
import torch.nn as nn
import torch.nn.functional as F
class VAE(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(784, 400)
self.fc21 = nn.Linear(400, 20) # mu
self.fc22 = nn.Linear(400, 20) # log-variance
self.fc3 = nn.Linear(20, 400)
self.fc4 = nn.Linear(400, 784)
def encode(self, x):
h1 = F.relu(self.fc1(x))
return self.fc21(h1), self.fc22(h1)
def reparameterize(self, mu, logvar):
std = torch.exp(0.5*logvar)
eps = torch.randn_like(std)
return mu + eps*std
def decode(self, z):
h3 = F.relu(self.fc3(z))
return torch.sigmoid(self.fc4(h3))
def forward(self, x):
mu, logvar = self.encode(x)
z = self.reparameterize(mu, logvar)
return self.decode(z), mu, logvar
def loss_function(recon_x, x, mu, logvar):
BCE = F.binary_cross_entropy(recon_x, x, reduction='sum')
KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
return BCE + KLD
AEとVAEの違い
| 項目 | Autoencoder | VAE |
|---|---|---|
| 学習方法 | 再構成誤差最小化 | ELBO最大化(再構成誤差 + KL散逸) |
| 潜在空間 | 固定値 | 確率分布(μ, σ) |
| データ生成能力 | × | ◯ |
| 応用先 | 圧縮、ノイズ除去、異常検知 | 生成モデル、画像生成、潜在空間探索 |
VAE vs GAN
1. 画像生成のクオリティ
- VAE:
- 再構成誤差を最小化するため、全体的な構造は捉えられるが、シャープさに欠ける。
- 出力が「平均的」になりやすく、ぼんやりした画像になりやすい。
- GAN:
- 決定論的な判別器とのゲームの中で、非常にリアルでシャープな画像を生成できる。
- 最新のモデル(StyleGAN2, BigGANなど)では人間が見ても区別が難しいレベルまで達している。
2. 学習の安定性
- VAE:
- ELBOに基づく明確な目的関数があり、安定して学習が進む。
- 勾配消失などの問題も少なめ。
- GAN:
- 生成器と判別器のバランスが難しく、収束しない場合が多い。
- モード崩壊(mode collapse)が発生することもある。
3. 潜在空間の構造
- VAE:
- KL散逸によって標準正規分布に近づけられるため、滑らかで連続的な潜在空間を持つ。
- z空間上で線形補間しても自然な変化が得られる。
- GAN:
- 潜在空間の構造は必ずしも滑らかではなく、小さなzの変化が急激な出力変化を引き起こすこともある。
4. 理論的背景
- VAE:
- 明確なベイズ的枠組み(変分推論)に基づいており、理論的に解析しやすい。
- GAN:
- 初期のminimaxゲームとしての理論はあるが、実装依存が強く汎用性が低い。
5. 応用性・拡張性
- VAE:
- 半教師あり学習、異常検知、時系列モデリングなどへの拡張が容易。
- β-VAE、CVAE、VAE-GANなど、様々な派生モデルが存在。
- GAN:
- 高品質画像生成に特化しており、他タスクへの汎用性はやや劣る。
- StyleGAN, CycleGAN, Pix2Pixなど、特定用途向けに進化。
| 項目 | VAE(Variational Autoencoder) | GAN(Generative Adversarial Network) |
|---|---|---|
| 目的 | 確率的潜在空間の学習 + 新規データ生成 | 高品質なリアルデータの生成 |
| 生成画像のクオリティ | 中~やや高(ぼんやりしがち) | 非常に高い(シャープでリアル) |
| 学習安定性 | 安定(勾配消失の問題が少ない) | 不安定(モード崩壊・収束困難) |
| 潜在空間の滑らかさ | 非常に滑らか(補間が自然) | 学習により異なる(必ずしも滑らかではない) |
| 理論的裏付け | 明確(変分推論 + 確率モデル) | 理論的枠組みはあるが実装依存が強い |
| 損失関数の意味 | 再構成誤差+KL項(解釈可能) | 敵対的なゲーム(損失の意味が曖昧) |
| サンプリング速度 | 高速(単純な分布からのサンプリング) | 推論ごとに生成器を通す必要あり |
| 多様性(Mode Coverage) | 多様性があるが洗練度は低め | モード崩壊のリスクあり(多様性不足) |
| 応用性 | 特徴抽出、異常検知、内挿にも適する | 主に高品位画像生成用途 |
| 教師あり学習との併用 | 可能(半教師ありVAEなど) | 制限あり(制約付きGANなどはある) |
| 項目 | VAEに向いているケース | GANに向いているケース |
|---|---|---|
| 用途 | 特徴抽出、異常検知、潜在空間探索、内挿 | 高品質画像生成、リアルな画像合成 |
| 必要条件 | 学習の安定性、理論的保証 | 高品位画像、視覚的インパクト |
| 実装難易度 | 比較的簡単 | 難しい(調整が必要) |
VAE 実装
環境構築
pip install torch torchvision torchbearer matplotlib numpy
import os
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline # Jupyter Notebook上でプロットを表示するため
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
from torchvision import transforms
from torchvision.utils import make_grid
from torchvision.datasets import FashionMNIST
import torchbearer
import torchbearer.callbacks as callbacks
from torchbearer import Trial, state_key
データの前処理
transform = transforms.Compose([transforms.ToTensor()]) # Tensor型へ変換
# FashionMNISTデータセットをダウンロード
trainset = FashionMNIST(root='../', train=True, transform=transform)
testset = FashionMNIST(root='../', train=False, transform=transform)
# DataLoaderでミニバッチを生成
traingen = torch.utils.data.DataLoader(trainset, batch_size=128, shuffle=True, num_workers=8)
testgen = torch.utils.data.DataLoader(testset, batch_size=128, shuffle=False, num_workers=8)
モデルの構築
MU = state_key('mu') # 潜在空間の平均値(mu)を保存するキー
LOGVAR = state_key('logvar') # 潜在空間の対数分散(logvar)を保存するキー
class VAE(nn.Module):
def __init__(self, latent_size):
super(VAE, self).__init__()
self.latent_size = latent_size
self.encoder = nn.Sequential(
nn.Conv2d(1, 32, 4, 1, 2), # B, 32, 28, 28
nn.ReLU(True),
nn.Conv2d(32, 32, 4, 2, 1), # B, 32, 14, 14
nn.ReLU(True),
nn.Conv2d(32, 64, 4, 2, 1), # B, 64, 7, 7
)
self.mu = nn.Linear(64 * 7 * 7, latent_size)
self.logvar = nn.Linear(64 * 7 * 7, latent_size)
self.upsample = nn.Linear(latent_size, 64 * 7 * 7)
self.decoder = nn.Sequential(
nn.ConvTranspose2d(64, 32, 4, 2, 1), # B, 64, 14, 14
nn.ReLU(True),
nn.ConvTranspose2d(32, 32, 4, 2, 1, 1), # B, 32, 28, 28
nn.ReLU(True),
nn.ConvTranspose2d(32, 1, 4, 1, 2) # B, 1, 28, 28
)
def reparameterize(self, mu, logvar):
if self.training:
std = torch.exp(0.5*logvar)
eps = torch.randn_like(std)
return eps.mul(std).add_(mu)
else:
return mu
def forward(self, x, state):
image = x
x = self.encoder(x).relu().view(x.size(0), -1)
mu = self.mu(x)
logvar = self.logvar(x)
sample = self.reparameterize(mu, logvar)
result = self.decoder(self.upsample(sample).relu().view(-1, 64, 7, 7))
if state is not None:
state[torchbearer.Y_TRUE] = image
state[MU] = mu
state[LOGVAR] = logvar
return result
- 入力画像をエンコーダー→潜在変数→デコーダーで再構成。
- state に中間結果を保存して損失計算などに利用。
損失関数の定義
- β倍のKL項を加えることで潜在空間の学習を制御(β-VAEのような挙動)。
def beta_kl(mu_key, logvar_key, beta=5):
@callbacks.add_to_loss
def callback(state):
mu = state[mu_key]
logvar = state[logvar_key]
return -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp()) * beta
return callback
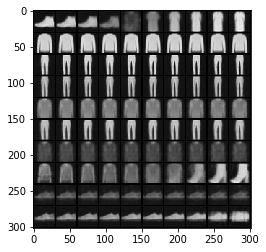
visualization
- 学習中に再構成画像を定期的に表示して進捗を確認。
def plot_progress(key=torchbearer.Y_PRED, num_images=100, nrow=10):
@callbacks.on_step_validation
@callbacks.once_per_epoch
def callback(state):
images = state[key]
image = make_grid(images[:num_images], nrow=nrow, normalize=True)[0, :, :]
plt.imshow(image.detach().cpu().numpy(), cmap="gray")
plt.show()
return callback
モデルの学習
model = VAE(latent_size=10)
optimizer = optim.Adam(filter(lambda p: p.requires_grad, model.parameters()), lr=5e-4)
trial = Trial(model, optimizer, nn.MSELoss(reduction='sum'), metrics=['acc', 'loss'], callbacks=[
beta_kl(MU, LOGVAR),
callbacks.ConsolePrinter(),
plot_progress()
], verbose=1).with_generators(train_generator=traingen, test_generator=testgen)
trial.to('cuda') # GPU使用設定
trial.run(20) # 20エポック学習
trial.evaluate(verbose=0, data_key=torchbearer.TEST_DATA)
- MSE Loss:再構成誤差を最小化。
- beta_kl:KL項を追加。
- plot_progress:毎エポックごとに画像を表示。
- ConsolePrinter:ログ出力。
- trial.to(‘cuda’):GPUでの高速処理を有効化。
結果のビジュアライゼーション