
pytorch フレームワーク 基本的な使い方
PyTorch is an optimized tensor library for deep learning using GPUs and CPUs.
目次
- 目次
- Pytorch インストール
- Tips
- 基本的な使い方
- Tensor
- Tensor の作成
- CUDA の使い方
- Autograd
- Dataset と DataLoader
- nn.Module
- Loss
- Optimizer
- Scheduler
Pytorch インストール
- use pip:
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118(CUDA11.8 は必要!!!)
最新の pytorch は conda でインストールのをできません。
Tips
torch.Tensor()と torch.Tensor([])の違い
torch.Tensor(2,3,4).size() # torch.Size([2, 3, 4])
torch.Tensor([2,3,4]).size() # torch.Size([3])
![torch.Tensor(2,3,4) と torch.Tensor([2,3,4])](/assert/dl_pytorch/image/torch_tensor.png)
torch.tensor()と torch.Tensor()の違い
- torch.Tensor()は、
dtype,requires_gradを指定できない、既存のデータ(リストや NumPy 配列など)からテンソルを作成または未初期化テンソルを作成のための関数 - torch.tensor()は、'dtype’などの引数を指定できる
data = [1, 2, 3]
tensor = torch.tensor(data, dtype=torch.float32, device='cuda')
tensor = torch.Tensor([1, 2, 3]) # 指定されたデータでテンソルを作成
tensor = torch.Tensor(2, 3) # 2x3の未初期化テンソルを作成
torch.mm と torch.mul の違い
✅ torch.mm:行列積 (Matrix Multiplication)
数学記号:
ここで、、と、C は行列です。
式展開:
>>> A = torch.tensor([[1, 2, 3], [4, 5, 6]]) # shape: (2, 3)
>>> B = torch.tensor([[1, 4], [2, 5], [3, 6]]) # shape: (3, 2)
>>> C = torch.mm(A, B)
>>> C
tensor([[14, 32],
[32, 77]])
✅ torch.mul:要素ごとの積 (Element-wise Multiplication)
数学記号:
ここで、 は同じ形の行列です。
式展開:
>>> A = torch.tensor([[1, 2], [3, 4]]) # shape: (2, 2)
>>> B = torch.tensor([[5, 6], [7, 8]]) # shape: (2, 2)
>>> C = torch.mul(A, B) # shape: (2, 2)
>>> C
tensor([[ 5, 12],
[21, 32]])
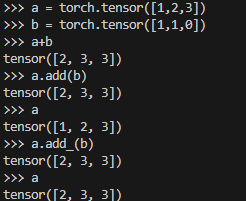
t.add と t.add_の違い
- t.add は元のテンソルを変更しない
- t.add_は元のテンソルを変更します
torch.stack と torch.cat
以下は PyTorch におけるtorch.stackとtorch.catの使い分けと詳細な説明です:
torch.stack vs torch.cat
基本的な違い
| 関数 | 動作 | 入力条件 | 出力形状 | 主な用途 |
|---|---|---|---|---|
torch.stack |
新しい次元を追加して結合 | 同じ形状のテンソルのみ | 入力テンソルの形状に新次元追加 | バッチ処理・次元拡張 |
torch.cat |
既存の次元で結合 | 次元数が同じテンソル | 指定次元のサイズが合算 | 特徴量結合・データ連結 |
| 関数 | 作用 |
|---|---|
torch.stack((A, B), dim) |
新しい次元を追加してテンソルを結合(入力テンソルは完全に同一形状である必要あり) |
torch.cat((A, B), dim) |
既存の次元に沿ってテンソルを連結(指定次元のサイズ以外は同一形状である必要あり) |
詳細な使用例
torch.stack
A = torch.tensor([[1, 2], [3, 4]]) # (2,2)
B = torch.tensor([[5, 6], [7, 8]]) # (2,2)
# dim=0でstack(バッチ次元追加)
C = torch.stack((A, B), dim=0)
print(C.shape) # torch.Size([2, 2, 2])
"""
tensor([[[1, 2],
[3, 4]],
[[5, 6],
[7, 8]]])
"""
# dim=1でstack(行方向に結合)
D = torch.stack((A, B), dim=1)
print(D.shape) # torch.Size([2, 2, 2])
"""
tensor([[[1, 2],
[5, 6]],
[[3, 4],
[7, 8]]])
"""
torch.cat
A = torch.randn(2, 3) # (2,3)
B = torch.randn(2, 3) # (2,3)
# dim=0で結合(行方向)
C = torch.cat((A, B), dim=0)
print(C.shape) # torch.Size([4, 3])
# dim=1で結合(列方向)
D = torch.cat((A, B), dim=1)
print(D.shape) # torch.Size([2, 6])
主な使用ケース
torch.stack の典型的な用途
- 複数の単一画像からバッチ次元を作成
img1 = torch.randn(3, 224, 224) # 画像1(CHW)
img2 = torch.randn(3, 224, 224) # 画像2
batch = torch.stack((img1, img2), dim=0) # バッチ次元追加 (2,3,224,224)
- 時系列データのフレームスタック
frame1 = torch.randn(256) # 特徴量ベクトル
frame2 = torch.randn(256)
sequence = torch.stack((frame1, frame2), dim=0) # (2,256)
torch.cat の典型的な用途
- マルチモーダルデータの結合
image_features = torch.randn(10, 512) # 画像特徴量
text_features = torch.randn(10, 256) # テキスト特徴量
combined = torch.cat((image_features, text_features), dim=1) # (10,768)
- レイヤー出力の連結
conv_out1 = torch.randn(32, 64, 64)
conv_out2 = torch.randn(32, 64, 64)
merged = torch.cat((conv_out1, conv_out2), dim=0) # (64, 64, 64)
注意事項
-
形状の一致要件:
# torch.stackは完全な形状一致が必要 A = torch.rand(2,3) B = torch.rand(2,3) torch.stack((A, B)) # OK A = torch.rand(2,3) B = torch.rand(3,2) torch.stack((A, B)) # RuntimeError -
次元指定の範囲:
A = torch.rand(2,3) B = torch.rand(2,3) torch.stack((A, B), dim=2) # 有効な次元範囲外(0-1) # IndexError: Dimension out of range
パフォーマンス比較
| 操作 | 実行時間(例) | メモリ使用量 |
|---|---|---|
| stack | 1.2ms ± 15µs | 高い(新次元作成) |
| cat | 850µs ± 10µs | 低い(既存次元拡張) |
epoch と iteration と batchsize などの関係
ここで、画像のデータセットを例にして:
image_numとは、画像はデータセットに何枚あるかを表す。epochとは、データセットを何回学習させるかを表す。iterationとは、毎回 epoch はデータセットを何回読み込むかを表す。batch_sizeとは、毎回 epoch は画像を何枚読み込むかを表す。total_iterationとは、(トレーニング)全体はデータセットを読み込む回数を表す。
基本的な使い方
import
import torch
print(torch.__version__) # pytorchバージョン
print(torch.version.cuda) # cudaバージョン
print(torch.cuda.is_available()) # cudaが利用可能かどうか
Tensor
Tensor は numpy の ndarray と同様にデータを格納するデータ構造です。
データ型
| データ型 | CPU Tensor | GPU Tensor |
|---|---|---|
| 8 ビット符号なし整数型 | torch.ByteTensor |
torch.cuda.ByteTensor |
| 8 ビット符号付き整数型 | torch.CharTensor |
torch.cuda.CharTensor |
| 16 ビット符号付き整数型 | torch.ShortTensor |
torch.cuda.ShortTensor |
| 32 ビット符号付き整数型 | torch.IntTensor |
torch.cuda.IntTensor |
| 64 ビット符号付き整数型 | torch.LongTensor |
torch.cuda.LongTensor |
| 32 ビット浮動小数点数型 | torch.FloatTensor |
torch.cuda.FloatTensor |
| 64 ビット浮動小数点数型 | torch.DoubleTensor |
torch.cuda.DoubleTensor |
| ブール型 | torch.BoolTensor |
torch.cuda.BoolTensor |
説明
- CPU Tensor: CPU 上で動作する PyTorch のテンソル型です。
- GPU Tensor: CUDA 対応 GPU 上で動作する PyTorch のテンソル型です。
(例:torch.cuda.FloatTensorは GPU 上での 32 ビット浮動小数点数型を表します。)
Tensor の作成
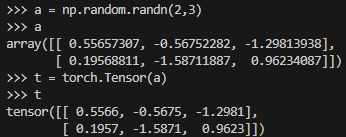
>>> a = np.random.randn(2,3)
>>> a
array([[ 0.55657307, -0.56752282, -1.29813938],
[ 0.19568811, -1.58711887, 0.96234087]])
>>> t = torch.tensor(a, dtype=torch.float32, device=torch.device('cuda:2'))
>>> t
tensor([[ 0.5566, -0.5675, -1.2981],
[ 0.1957, -1.5871, 0.9623]], device='cuda:2')
randxxx
randn
>>> torch.randn([2,3])
tensor([[-0.4271, 1.0660, 1.2755],
[-1.5805, 0.4410, 0.4207]])
>>> torch.randn([2,3], dtype=torch.float64, device='cuda')
tensor([[-0.8559, 1.0472, 0.6330],
[-0.5150, -0.8062, -2.4052]], device='cuda:0', dtype=torch.float64)
randint
>>> torch.randint(0, 10, [2,3])
tensor([[5, 7, 5],
[0, 7, 9]])
>>> torch.randint(0, 10, [2,3], dtype=torch.int8, device='cuda')
tensor([[7, 8, 6],
[7, 5, 2]], device='cuda:0', dtype=torch.int8)
>>> torch.randint(0, 10, [2,3]).dtype
torch.int64
tensor の運算
| 関数 | 作用 |
|---|---|
torch.abs(A) |
絶対値を計算する |
torch.add(A, B) |
加算を行う。A と B は Tensor またはスカラーのいずれでも可能 |
torch.clamp(A, min, max) |
クリップ(範囲制限)。A のデータがminより小さいかmaxより大きい場合、minまたはmaxに変換され、範囲を[min, max]に保つ |
torch.div(A, B) |
除算を行う。A / B。A と B は Tensor またはスカラーのいずれでも可能 |
torch.mul(A, B) |
要素ごとの乗算(点乗算)。A * B。A と B は Tensor またはスカラーのいずれでも可能 |
torch.pow(A, n) |
べき乗を計算する。A の n 乗 |
torch.mm(A, B.T) |
行列の乗算(行列積)。torch.mulとの違いに注意 |
torch.mv(A, B) |
行列とベクトルの乗算。A は行列、B はベクトル。B は転置の必要はない |
A.item() |
Tensor を基本データ型に変換する。Tensor に要素が 1 つしかない場合に使用可能。主に Tensor から数値を取り出すために使用 |
A.numpy() |
Tensor を Numpy 型に変換する |
A.size() |
サイズを確認する |
A.shape |
サイズを確認する |
A.dtype |
データ型を確認する |
A.view() |
テンソルのサイズを再構築する。Numpy のreshapeに類似 |
A.transpose(0, 1) |
行と列を交換する |
A[1:] |
スライス。Numpy のスライスに類似 |
A[-1, -1] = 100 |
スライス。Numpy のスライスに類似 |
A.zero_() |
ゼロ化する(すべての要素を 0 にする) |
torch.stack((A, B), dim=-1) |
テンソルを結合し、次元を増やす |
torch.diag(A) |
A の対角要素を取り出し、1 次元ベクトルを形成する |
torch.diag_embed(A) |
1 次元ベクトルを対角線に配置し、残りの要素を 0 とするテンソルを作成する |
torch.unqueeze(A, dim) |
テンソルの指定した次元に要素を追加する |
CUDA の使い方
- デバイスを設定する
- テンソルを GPU に移動する
- 計算する
使う例
import torch
# GPU環境が利用可能かテスト
print(torch.__version__) # PyTorchのバージョン確認
print(torch.version.cuda) # CUDAのバージョン確認
print(torch.cuda.is_available()) # CUDAが利用可能か確認
# GPUまたはCPUのデバイス選択
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# オブジェクトの実行環境を確認
a.device # テンソルaが存在するデバイスを表示
# オブジェクトを指定デバイスに転送
A = A.to(device) # テンソルAを選択したデバイス環境に設定
# オブジェクトをCPU環境に転送
A.cpu().device # テンソルAをCPU環境に移動
# 異なるデバイス間での演算時の自動変換
a + b.to(device) # デバイス環境が混在する場合、bのデバイス環境に統一される
# CUDAテンソルからnumpyへの変換手順
a.cpu().numpy() # CUDAテンソルはCPU経由でnumpyに変換する必要あり
# CUDA型テンソルの作成
torch.tensor([1,2], device=device) # 指定デバイス上に直接テンソルを作成
関するコマンド
- bash に
nvidia-smiで GPU の状態を確認する torch.cuda.is_available()で GPU が利用可能か確認するtorch.cuda.empty_cache()でメモリを解放するtorch.cuda.device_count()で GPU の数を確認するtorch.cuda.get_device_name(0)で GPU の名前を確認するtorch.cuda.current_device()で現在の GPU を確認する(おもに multi-gpus をつかう場合)
Autograd
Autograd は自動微分のこと。つまり、関数の値や勾配を自動で計算する。
- Backpropagation → 誤差逆伝播法
- Chain Rule → 連鎖律
- Dynamic Graph → 動的計算グラフ
- Static Graph → 静的計算グラフ
自動微分(Automatic Differentiation)はディープラーニングフレームワークの中核機能で、数学関数の導関数を自動的に計算します。
主な用途
- ニューラルネットワークの訓練時の勾配計算
- 誤差逆伝播法(Backpropagation)の実装
基本原理
連鎖律(Chain Rule)に基づき、複合関数の導関数を効率的に計算します。PyTorch のモデルは多くの層で構成される複雑な関数のため、Autograd が各層の勾配を効率的に計算します。
動的グラフ vs 静的グラフ
| 種類 | 特徴 | フレームワーク例 |
|---|---|---|
| 動的計算グラフ | 実行時にグラフを構築(デバッグ・変更が容易) | PyTorch |
| 静的計算グラフ | 実行前にグラフを構築(最適化が可能) | TensorFlow(初期版) |
PyTorch での実装方法
torch.Tensorオブジェクトのrequires_grad属性で勾配計算の有無を制御:
# 勾配計算が必要なテンソル作成
x = torch.randn(2, 2, requires_grad=True)
print(x)
# tensor([[-0.5736, -0.2012],
# [ 1.3563, 0.5499]], requires_grad=True)
# 演算の追跡
y = x + 2
z = y * y * 3
out = z.mean()
print(out)
# tensor(17.2779, grad_fn=<MeanBackward0>)
逆伝播(Backpropagation)
.backward()メソッドで勾配計算:
out.backward() # 勾配計算
print(x.grad) # 勾配値の確認
# tensor([[2.1396, 2.6982],
# [5.0345, 3.8248]])
勾配計算の無効化
以下の方法で勾配計算を停止可能:
# 方法1: コンテキストマネージャー
with torch.no_grad():
y = x * 2
# 方法2: メソッドの引数
@torch.no_grad()
def inference():
y = x * 2
return y
# 方法3: 属性設定
print(x.requires_grad)
# True
x.requires_grad_(False)
# tensor([[-0.5736, -0.2012],
# [ 1.3563, 0.5499]])
print(x.requires_grad)
# False
主なメソッド
| メソッド | 説明 |
|---|---|
.backward() |
勾配を自動計算 |
.detach() |
勾配追跡から切り離したテンソルを生成 |
torch.no_grad() |
勾配計算を無効にするコンテキスト |
.retain_grad() |
非リーフテンソルの勾配を保持 |
Dataset と DataLoader
使用の例
from torch.utils.data import DataLoader, Dataset
# Datasetの基本構造
class CustomDataset(Dataset):
def __init__(self, data, targets):
self.data = data
self.targets = targets
def __getitem__(self, index):
return self.data[index], self.targets[index]
def __len__(self):
return len(self.data)
# DataLoaderの基本使用例
train_dataset = CustomDataset(data_samples, target_labels)
train_loader = DataLoader(
dataset=train_dataset,
batch_size=64,
shuffle=True,
num_workers=4
)
# 実行ループ例
for epoch in range(num_epochs):
for batch_data, batch_labels in train_loader:
batch_data = batch_data.to(device)
batch_labels = batch_labels.to(device)
...
Dataset の説明
-
役割
データセットの抽象基底クラス。データの読み込みと前処理をカプセル化し、データアクセスを一貫性のある方法で提供します。 -
必須メソッド
__getitem__(self, index): 指定インデックスのデータサンプルを返す__len__(self): データセットの総サンプル数を返す
-
特徴
- データ変換(transforms)の統合が可能
- 自定义データ形式のサポート
- データの並列読み込みとキャッシュの最適化
DataLoader の説明
- 役割
データセットをバッチ単位で効率的に読み込み、モデル訓練に最適なデータパイプラインを提供します。
# DataLoaderの主要パラメータとその説明(橙色部分重点)
from torch.utils.data import DataLoader, Dataset
class SampleDataset(Dataset):
def __init__(self):
self.data = [...] # データセットの初期化
def __len__(self):
return len(self.data)
def __getitem__(self, idx):
return self.data[idx]
# データローダーの実用的設定例
train_loader = DataLoader(
dataset=SampleDataset(), # [必須] 使用するDatasetオブジェクト
batch_size=32, # [重要] バッチサイズ(デフォルト1)
shuffle=True, # [重要] エポックごとにデータをシャッフル(学習時はTrue推奨)
num_workers=4, # [重要] データ読み込みの並列プロセス数(0でシングルスレッド)
collate_fn=None, # [応用] カスタムバッチ作成関数(不規則データ用)
pin_memory=True, # [GPU推奨] CUDAへの高速転送を可能にする
drop_last=False # [調整] 最後の不完全バッチを削除するか(デフォルトFalse)
)
主要パラメータの詳細説明
| パラメータ | 役割と設定例 | 最適化のポイント |
|---|---|---|
| dataset | データソースとなる Dataset オブジェクト(必須) | 自作 Dataset クラスか torchvision.datasets 等の既存データセットを使用する |
| batch_size | 1 イテレーションあたりのサンプル数 | GPU メモリ容量とトレードオフ (例:32/64/128/256) |
| shuffle | エポックごとにデータをランダムシャッフルするか | 学習時は True で過学習防止 評価時は False で安定化 |
| num_workers | データ読み込み用プロセス数(I/O 並列化) | CPU リソース許す限り増やす(例:4-8)num_workers=0はシングルスレッド |
| collate_fn | バッチ作成時のカスタム処理(不規則形状データ用) | 画像とテキストの組み合わせなど、形状が異なるデータをバッチ化する際に必要 |
| pin_memory | CUDA への転送速度向上(ページ锁定メモリ使用) | GPU 環境では必ず True に設定 (CPU→GPU 転送速度が約 2 倍速くなる) |
| drop_last | 最後の不完全バッチを削除するか | バッチ処理が厳密なサイズ要求の場合は True (例:特定のモデルアーキテクチャ) |
実践的な設定例
# GPU環境向け最適設定例
dataloader = DataLoader(
dataset=train_dataset,
batch_size=64, # GPUメモリ許容範囲で最大限設定
shuffle=True,
num_workers=4, # CPUコア数に応じて調整
pin_memory=True, # CUDA環境必須
drop_last=False # データロスを許容できない場合
)
# データオーギメンテーション付き例
from torchvision import transforms
test_dataset = MyDataset(transform=transforms.Compose([...]))
test_loader = DataLoader(
dataset=test_dataset,
batch_size=16,
shuffle=False,
num_workers=2,
collate_fn=my_custom_collate # 不規則データ用
)
重要な注意点
-
num_workers の最適化
- 物理 CPU コア数の半分を推奨(例:8 コアなら 4)
- オーバー設定するとメモリ不足の可能性あり
-
pin_memory の効果
- CUDA テンソルへの転送速度が約 2 倍向上
- CPU→GPU 転送がボトルネックの場合は必須
-
バッチサイズのトレードオフ
- 大きくすると学習安定性向上だがメモリ使用増加
- 小さくすると学習速度向上だが不安定化の可能性
-
collate_fn の使用ケース
- 文字列と画像のペアデータ
- 多可変長入力(例:異なる長さの時系列データ)
- データ拡張をバッチレベルで実施する場合
-
特徴
- マルチプロセスデータローディングで I/O ボトルネックを軽減
- サンプル加重やサブセット抽出のサポート
- バッチ正規化やデータオーギメンテーションの統合
nn.Module
PyTorch はtorch.nn.Moduleクラスを通じてニューラルネットワーク構築の便利なインターフェースを提供します。nn.Module クラスを継承し、独自のネットワーク層を定義することができます。
作成例
import torch.nn as nn
import torch.optim as optim
# 全結合ニューラルネットワークの定義
class SimpleNN(nn.Module):
def __init__(self):
super(SimpleNN, self).__init__()
self.fc1 = nn.Linear(1024, 224) # 入力層から隠れ層へ
self.fc2 = nn.Linear(224, 10) # 隠れ層から出力層へ
def forward(self, x):
x = torch.relu(self.fc1(x)) # ReLU活性化関数
x = self.fc2(x)
return x
# ネットワークインスタンスの作成
model = SimpleNN()
# モデル構造の表示
print(model)
主なポイント
nn.Moduleを継承してネットワーククラスを定義__init__メソッドで層を初期化forwardメソッドでデータの流れを定義
出力結果
SimpleNN(
(fc1): Linear(in_features=1024, out_features=224, bias=True)
(fc2): Linear(in_features=224, out_features=10, bias=True)
)
簡単なトレーニングの例
ニューラルネットワークはニューロン間の接続重みを調整することで予測結果を最適化し、このプロセスには以下の要素が含まれます:
- 順伝播(Forward Propagation)
- 損失計算(Loss Calculation)
- 逆伝播(Backward propagation)
- パラメータ更新(Parameter Update)
# 実行ループ例
model.train() # モデルを学習モードに設定
for epoch in range(num_epochs):
for batch_data, batch_labels in train_loader: # バッチデータを取得
batch_data = batch_data.to(device)
batch_labels = batch_labels.to(device)
outputs = model(batch_data) # 順伝播
loss = criterion(outputs, batch_labels) # 損失計算
loss.backward() # 逆伝播とパラメータ更新(簡単の例)
主なニューラルネットワークの種類と用途:
| 種類 | 用途例 |
|---|---|
| フィードフォワードネットワーク | 基本的なパターン認識 |
| 畳み込みニューラルネットワーク(CNN) | 画像認識、物体検出 |
| リカレントニューラルネットワーク(RNN) | 時系列データ分析、自然言語処理 |
| LSTM ネットワーク | 長期依存関係のある時系列データ処理 |
Loss
損失関数の基本概念
-
損失(Loss)の役割
- モデル予測値と真値の差異を定量化
- 逆伝播時の勾配計算の基準となる
- 学習プロセスの収束状況を監視
-
主な損失関数の種類
損失関数クラス 数学式 主な用途 入力形式要件 nn.MSELoss回帰問題 連続値(任意形状) nn.CrossEntropyLoss多クラス分類 ロジット値(未正規化) nn.BCELoss二値分類 確率値(0-1 範囲) nn.L1Lossロバスト回帰 連続値(任意形状) nn.TripletMarginLoss類似度学習 3 組の埋め込みベクトル
pytorch 損失関数の使用例
# 代表的な損失関数の使用例
import torch.nn as nn
# 平均二乗誤差(回帰問題用)
mse_loss = nn.MSELoss()
output = model(inputs)
loss = mse_loss(output, targets)
# 交差エントロピー(分類問題用)
ce_loss = nn.CrossEntropyLoss()
output = model(inputs)
loss = ce_loss(output, targets)
# バイナリ交差エントロピー(二値分類用)
bce_loss = nn.BCELoss()
output = torch.sigmoid(model(inputs)) # 確率値に変換
loss = bce_loss(output, targets.float())
カスタム損失関数の作成方法
# 方法1: nn.Moduleを継承
class CustomLoss(nn.Module):
def __init__(self, alpha=0.5):
super().__init__()
self.alpha = alpha
def forward(self, pred, target):
mse = torch.mean((pred - target)**2)
l1 = torch.mean(torch.abs(pred - target))
return self.alpha * mse + (1 - self.alpha) * l1
# 方法2: 関数形式
def custom_loss(pred, target, beta=0.3):
base_loss = F.binary_cross_entropy(pred, target)
penalty = torch.mean(torch.relu(pred - 0.7))**2
return base_loss + beta * penalty
実践的な使用例
# マルチタスク学習用の複合損失
class MultiTaskLoss(nn.Module):
def __init__(self):
super().__init__()
self.ce = nn.CrossEntropyLoss()
self.mse = nn.MSELoss()
def forward(self, pred_class, pred_reg, target_class, target_reg):
loss1 = self.ce(pred_class, target_class)
loss2 = self.mse(pred_reg, target_reg)
return loss1 + 0.5*loss2 # 重み付け加算
# 学習ループ内での利用
criterion = MultiTaskLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
for epoch in range(epochs):
for data, (labels_class, labels_reg) in train_loader:
outputs_class, outputs_reg = model(data)
loss = criterion(outputs_class, outputs_reg, labels_class, labels_reg)
optimizer.zero_grad()
loss.backward()
optimizer.step()
損失関数選択のガイドライン
| 問題タイプ | 推奨損失関数 | 補足事項 |
|---|---|---|
| 回帰問題 | MSELoss / HuberLoss |
外れ値が多い場合は HuberLoss が安定 |
| 多クラス分類 | CrossEntropyLoss |
出力層の直前に Softmax 不要(組み込み済み) |
| 二値分類 | BCELoss |
出力をシグモイドで確率値に変換する必要あり |
| マルチラベル分類 | BCEWithLogitsLoss |
シグモイド+BCELoss を組み合わせた効率的な実装 |
| 不均衡データ分類 | 重み付きCrossEntropyLoss |
クラスごとのサンプル数に応じて重み設定 |
| 物体検出 | SmoothL1Loss |
バウンディングボックス回帰に有効 |
勾配計算の注意点
-
カスタム損失の微分保証
- PyTorch の組み込み関数のみ使用すれば自動微分可能
- 独自の数学的操作を行う場合、微分可能性を確認する必要あり
-
メモリ効率最適化
# メモリ節約テクニック loss = criterion(output, target) loss.backward() # 勾配計算 optimizer.step() # パラメータ更新 optimizer.zero_grad() # 勾配リセット(重要!) -
複数損失の組み合わせ
# 複数損失を個別に計算する例 loss1 = criterion1(output1, target1) * weight1 loss2 = criterion2(output2, target2) * weight2 total_loss = loss1 + loss2 total_loss.backward()
Optimizer
使用例
# 主要オプティマイザの使用例
import torch.optim as optim
# モデルパラメータとオプティマイザの初期化
model = SimpleNN()
optimizer = optim.Adam(model.parameters(), lr=0.001, weight_decay=1e-4)
# 学習ループでの使用
for epoch in range(epochs):
for data, target in train_loader:
optimizer.zero_grad() # 勾配のリセット
output = model(data)
loss = criterion(output, target)
loss.backward() # 勾配計算
optimizer.step() # パラメータ更新
PyTorch オプティマイザの主要機能
-
パラメータ更新メカニズム
- 勾配降下法の変種を実装
- モーメンタム、重み減衰などの拡張機能をサポート
- 自動微分結果を利用した効率的なパラメータ更新
-
主要オプティマイザの比較
オプティマイザ メリット デメリット 最適な使用ケース SGD シンプル、メモリ効率良好 収束が遅い 小規模データセット Adam 高速収束、ハイパラ調整少 メモリ使用多 深層学習全般 RMSprop 不安定な勾配に強い 学習率調整必要 RNN/LSTM Adagrad 特徴頻度適応型 学習率急速低下 スパースデータ Adadelta 学習率自動調整 計算コスト高 長期依存関係 -
共通パラメータ
optimizer = optim.Adam( params=model.parameters(), # 必須:最適化対象パラメータ lr=0.001, # 学習率(デフォルト値あり) betas=(0.9, 0.999), # モーメンタム係数(Adam専用) weight_decay=0.01, # L2正則化係数 amsgrad=False # AMSGrad変種(Adam専用) )
実践的な使用パターン
異なるレイヤーに異なる学習率を設定
# パラメータグループの分割
optimizer = optim.SGD([
{'params': model.base.parameters(), 'lr': 0.001},
{'params': model.classifier.parameters(), 'lr': 0.01}
], momentum=0.9)
# 学習率スケジューラとの連携
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=30, gamma=0.1)
勾配クリッピング
# 勾配のノルム制限
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
optimizer.step()
主要オプティマイザの数式比較
| オプティマイザ | 更新式(簡略版) |
|---|---|
| SGD | |
| Momentum | |
| Adam |
パフォーマンス最適化 Tips
-
学習率のウォームアップ
# 初期数エポックで学習率を徐々に増加 warmup_epochs = 5 for epoch in range(epochs): lr = base_lr * min(epoch / warmup_epochs, 1.0) for param_group in optimizer.param_groups: param_group['lr'] = lr # 通常の学習処理... -
勾配蓄積(メモリ不足時)
accumulation_steps = 4 for i, (data, target) in enumerate(train_loader): output = model(data) loss = criterion(output, target) loss = loss / accumulation_steps # 損失のスケーリング loss.backward() if (i+1) % accumulation_steps == 0: optimizer.step() optimizer.zero_grad() -
混合精度トレーニング
scaler = torch.cuda.amp.GradScaler() for data, target in train_loader: optimizer.zero_grad() with torch.cuda.amp.autocast(): output = model(data) loss = criterion(output, target) scaler.scale(loss).backward() scaler.step(optimizer) scaler.update()
よくあるエラーと対策
-
勾配の未リセット
# 誤り例 output = model(input) loss.backward() optimizer.step() # 勾配が蓄積される # 正しい例 optimizer.zero_grad() output = model(input) loss.backward() optimizer.step() -
パラメータグループの誤指定
# 誤り例(重み減衰の不適切適用) optimizer = Adam(model.parameters(), weight_decay=1e-4) # BatchNorm層にも適用される # 正しい例 params = [ {'params': model.features.parameters(), 'weight_decay': 1e-4}, {'params': model.bn.parameters(), 'weight_decay': 0} ] optimizer = Adam(params, lr=0.001) -
学習率スケジューラの誤使用
# 誤り例(ステップ位置不適切) optimizer.step() scheduler.step() # エポック終了時に実行するべき # 正しい例 for epoch in range(epochs): for batch in train_loader: # ...学習処理... optimizer.step() scheduler.step()
Scheduler
PyTorch のlr_scheduler(学習率スケジューラ)は、ニューラルネットワークの訓練中に学習率を動的に調整するための仕組みです。これにより、収束速度やモデル性能を向上させることが可能になります。
- 初期段階では大きい学習率で探索
- 後半は小さい学習率で微調整
- 過学習の防止・汎化性能の向上
よく使われる Scheduler 一覧
| クラス名 | 説明 |
|---|---|
StepLR |
一定エポックごとに学習率を減少(gamma 倍) |
MultiStepLR |
指定した複数のエポックで学習率を減少 |
ExponentialLR |
各エポックで学習率を指数関数的に減少 |
CosineAnnealingLR |
コサイン減衰に従って学習率を変化 |
ReduceLROnPlateau |
検証損失が改善しなくなったときに学習率を減少 |
CyclicLR |
学習率を周期的に増減させる |
OneCycleLR |
エポック内で 1 回だけ学習率を上げ下げする(高性能) |
使用例:
import torch
from torch.optim import SGD
from torch.optim.lr_scheduler import StepLR
model = ... # モデル定義
optimizer = SGD(model.parameters(), lr=0.1)
scheduler = StepLR(optimizer, step_size=30, gamma=0.1)
for epoch in range(100):
for input, target in dataloader:
optimizer.zero_grad()
output = model(input)
loss = loss_fn(output, target)
loss.backward()
optimizer.step()
scheduler.step() # エポックごとに呼び出す
ReduceLROnPlateau の使い方
from torch.optim.lr_scheduler import ReduceLROnPlateau
scheduler = ReduceLROnPlateau(optimizer, 'min', patience=5)
for epoch in range(epochs):
train(...)
val_loss = validate(...)
scheduler.step(val_loss) # 検証ロスを与える
OneCyclePolicy の使い方
Sets the learning rate of each parameter group according to the 1cycle learning rate policy.
from torch.optim.lr_scheduler import OneCycleLR
scheduler = OneCycleLR(
optimizer,
max_lr=0.01,
steps_per_epoch=len(dataloader),
epochs=num_epochs
)
for epoch in range(num_epochs):
for batch in dataloader:
...
scheduler.step()
実践的な Tips
scheduler.step()は通常 各エポック終了時に 1 回だけ呼び出す- 多重のスケジューラを使う場合は順序に注意
- スケジューラとオプティマイザの状態を保存するには
state_dict()を使う
warmup を使って初期の不安定性を抑える
# スケジューラの設定
warmup_epochs = 5
total_epochs = 100
# Cosine Annealing スケジューラ (warmup設定)
lr_scheduler = CosineAnnealingLR(
optimizer,
max_epochs=total_epochs,
warmup_epochs=warmup_epochs,
warmup_start_lr=0.0001,
eta_min=0.00001
)